1 线性插值
线性插值是指插值函数为一次多项式的插值方式,其在插值节点上的插值误差为零。
线性插值相比其他插值方式,如抛物线插值,具有简单、方便的特点。
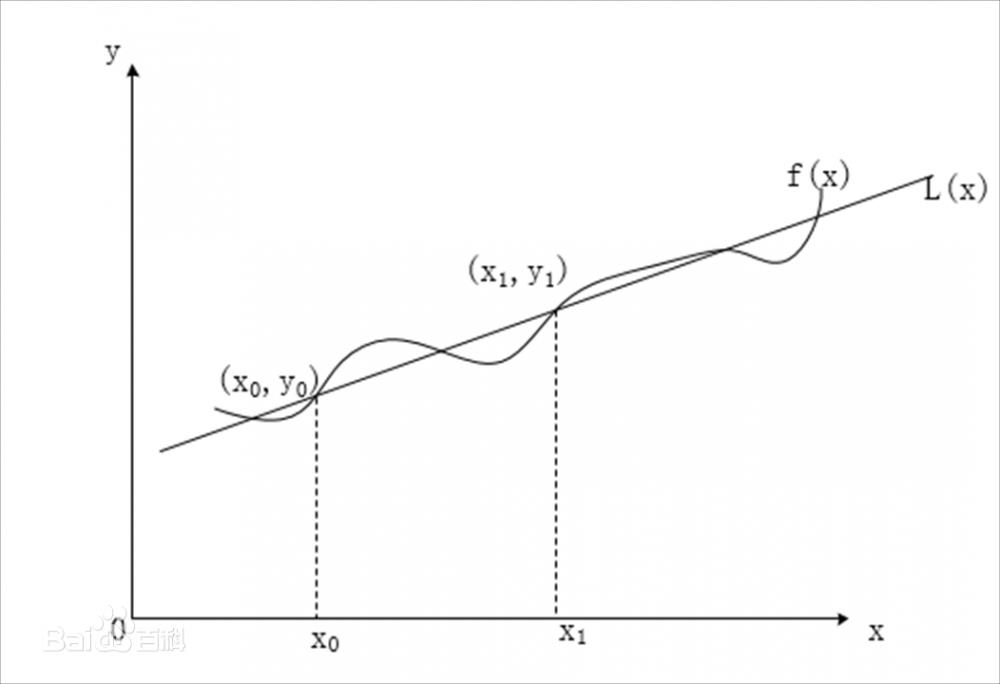
线性插值的几何意义即为概述图中利用过A点和B点的直线来近似表示原函数。
线性插值可以用来近似代替原函数,也可以用来计算得到查表过程中表中没有的数值。
1.2 基础知识
已知函数 在区间
在区间 上
上 个互异点
个互异点 上的函数值
上的函数值 ,若存在一简单函数
,若存在一简单函数 ,使
,使

并要求误差

的绝对值 在整个区间
在整个区间 上比较小。这样的问题称为插值问题。
上比较小。这样的问题称为插值问题。
其中:
 :插值节点
:插值节点
 :被插值函数
:被插值函数
 :插值函数
:插值函数
 :插值区间
:插值区间
如果在插值区间内部用 代替
代替 则称为内插;在插值区间以外,用
则称为内插;在插值区间以外,用 代替
代替 则称为外插。
则称为外插。
1.3 简介
线性插值是一种较为简单的插值方法,其插值函数为一次多项式。线性插值,在各插值节点上插值的误差为0。
设函数 在两点
在两点 ,
, 上的值分别为
上的值分别为 ,
, ,求多项式
,求多项式

使满足

由解析几何可知

称 为
为 在
在 处的一阶均差,记以
处的一阶均差,记以 。于是,得
。于是,得

如果按照 整理,则
整理,则

以上插值多项式为一次多项式,这种插值称为线性插值。
1.4 几何意义
线性插值的几何意义如图1所示,即为利用过点 和
和 的直线
的直线 来近似原函数
来近似原函数 。
。
1.5 应用
1)线性插值在一定允许误差下,可以近似代替原来函数;
2)在查询各种数值表时,可通过线性插值来得到表中没有的数值。
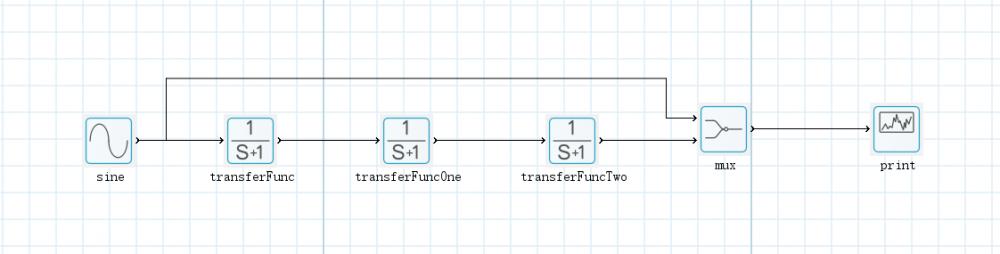
2一维线性插值仿真实例
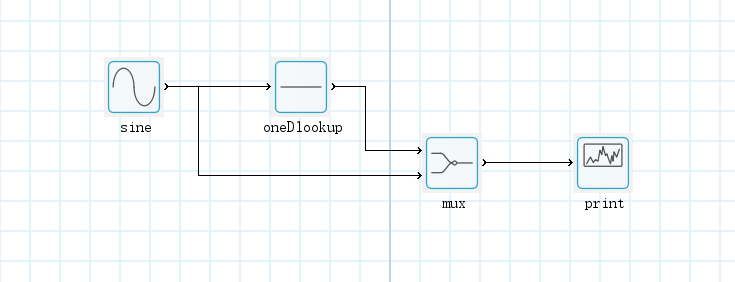
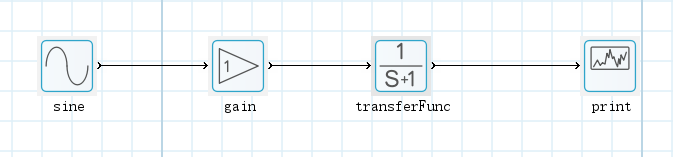
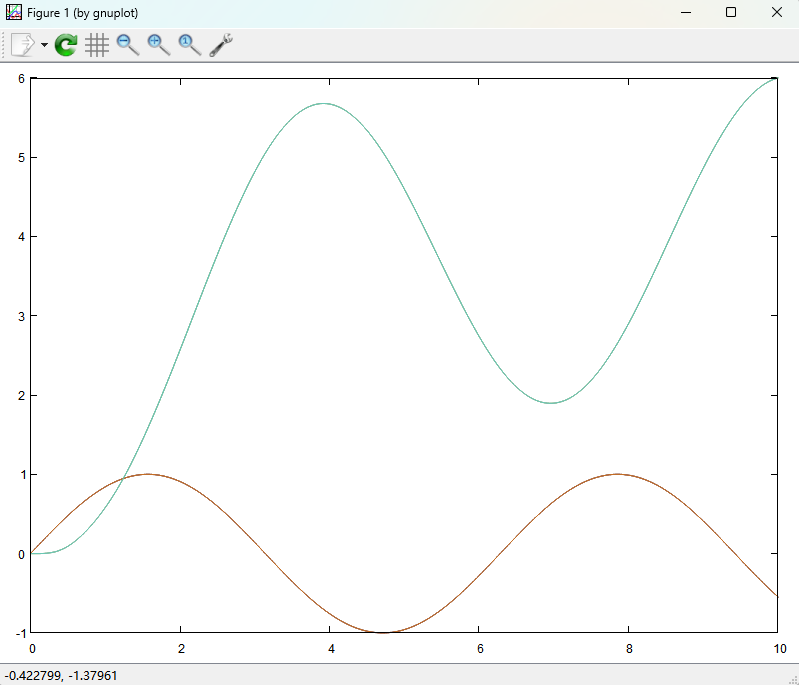
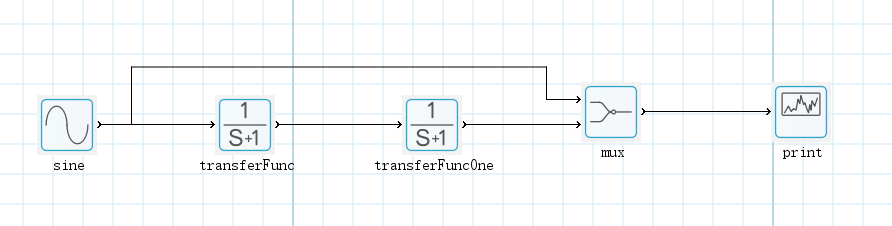
首先,在Baltamulink中,添加输出正弦波模块、一维插值模块、信号合并模块、输出模块,建立一维插值仿真模型,每个模块参数都设置为默认值;模型如下图所示;
设置仿真参数:
仿真时长:10s;步长0.01s;求解器:ode4
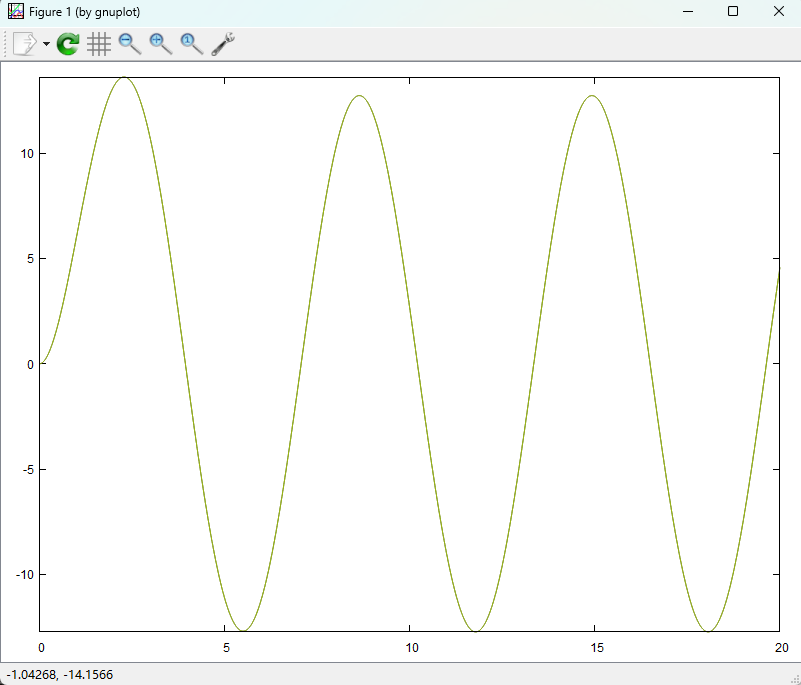
得到的仿真结果,如下图所示:
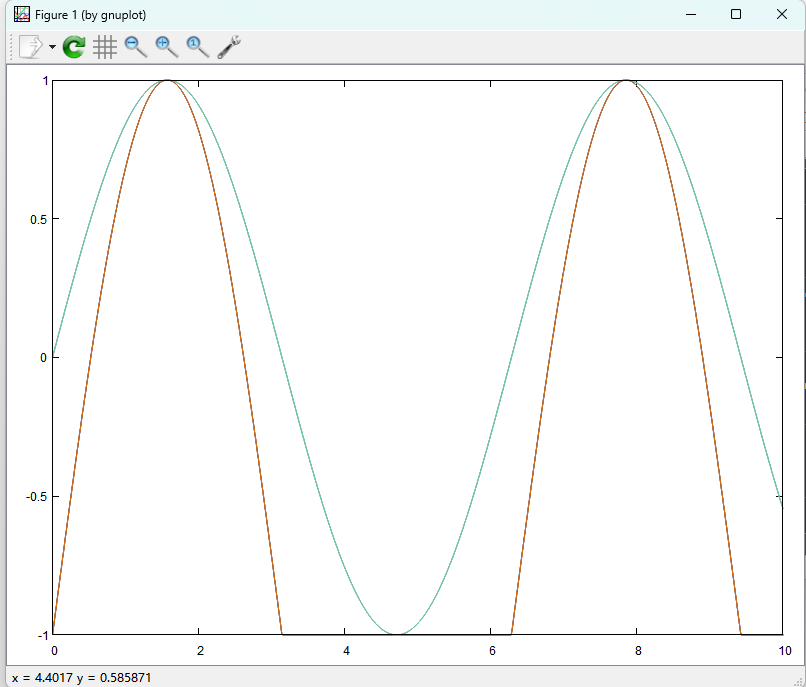
绿色代表原正弦波数据;
橙色表示一维插值后的正弦波数据。
已知质量块质量 m = 1kg,阻尼 b = 3 N.s/m,弹簧系数 k = 90 N/m,且物块的初始位移 x(0) = 0.04m,其初始速度为x’(0) = 0.01 m/s。创建该系统的北太真元模型,并运行仿真。弹簧-质量-阻尼系统如下图所示:
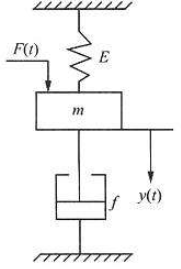
建立理论数学模型。对于无外力的系统,根据牛顿定理可以得到:
mx’’ + bx’ + kx = 0
代入数值并整理得:
x’’ = -3x’ - 90x
在北太真元建立模型如下图所示:
设置仿真参数:
仿真时长:10s;步长0.01s;求解器:ode4
得到的仿真结果,如下图所示:
已知二自由度质量-弹簧-阻尼串联系统模型如下图所示:
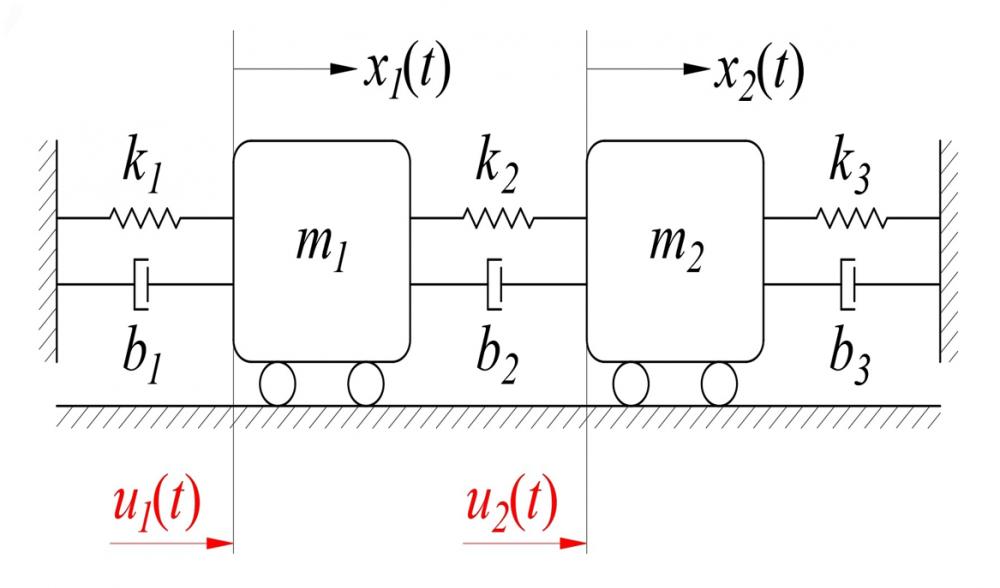
这个系统由两个质量块(小车)和三组弹簧阻尼器组成,假设地面是光滑的,这样系统中没有摩擦作用。 u1(t) 和 u2(t) 分别是两个质量块所受的外力, x1(t) 和 x2(t) 分别是两个质量块的位移。 m1,2、k1,2,3 和 b1,2,3 分别对应图中的质量、弹簧刚度和阻尼系数。是对于整个系统而言,输入两个外力,输出两个位移,因此这是一个多输入多输出系统。两个小车都只能沿横向左右运动,因此为二自由度系统。
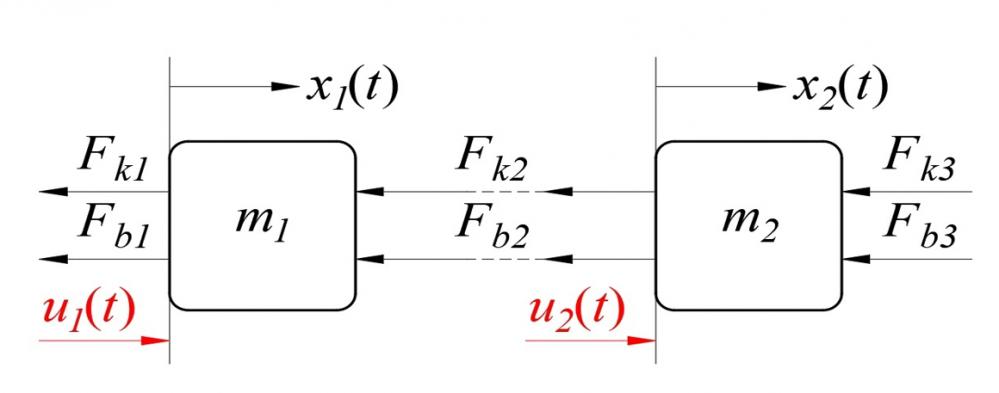
根据牛顿第二定律,物体所受合力等于物体的惯性力,而惯性力是物体质量与加速度的乘积。可以理解为物体受力后产生加速度,而有加速度存在就会产生运动趋势,造成物体运动。
对两个质量块分别进行受力分析:
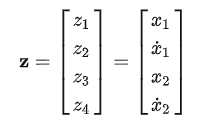
首先需定义系统的状态变量,在这种情况下一般用物体的位移和速度作为状态变量。设状态向量 Z分别对应质量块1的位移和速度、质量块2的质量和速度:
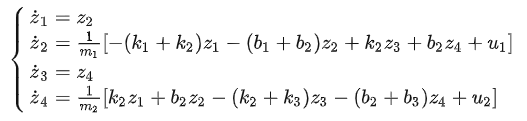
根据上面对模型的数学推导,当将各状态向量 z 对时间求导(微分),可以将系统整理为各状态量的一阶微分方程组:
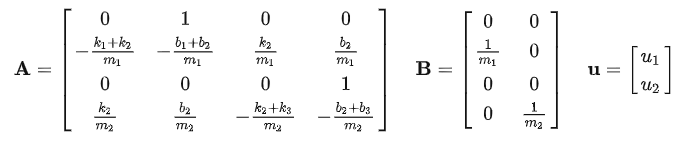
因为这是一个线性系统,因此系统的状态可以表示为矩阵形式:

式中,A 为系统状态矩阵;B 为输入矩阵;u 为输入(控制)向量:
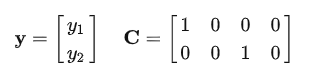
有了系统的状态空间方程,接下来考虑系统的输出,也就是我们希望得到的量。我们假设对两个质量块的位移感兴趣,即 z1 和 z3 ,那么就将它两个状态作为系统的输出,则输出方程的矩阵形式为:y = Cz;
式中,y 为输出向量;C 为输出矩阵:
以上,使用状态空间模型对系统完成描述。
令,质量:m = 1kg;弹簧刚度: k = 1N/m;阻尼系数:b = 1N.s/m。
则,状态空间方程系数如下:
A = [0 1 0 0;-2 -2 1 1;0 0 0 1;1 1 -2 -2];
B = [0 0;1 0;0 0;0 1];
C = [1 0 0 0;0 0 1 0];
D = [0 0;0 0];
在北太真元建立模型如下图所示:
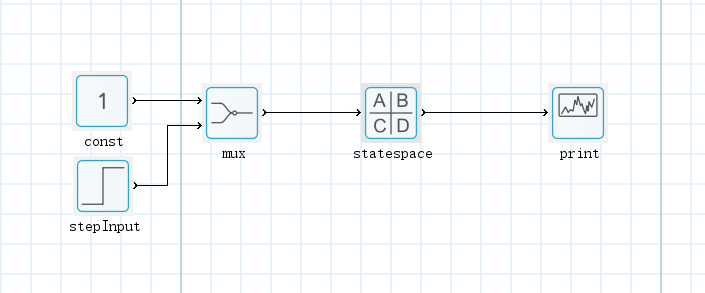
设置仿真参数:
两个质量块所受的外力u1是常量模块 = 2 N; u2是阶跃型号=1N。
仿真时长:10s;步长0.01s;求解器:ode4
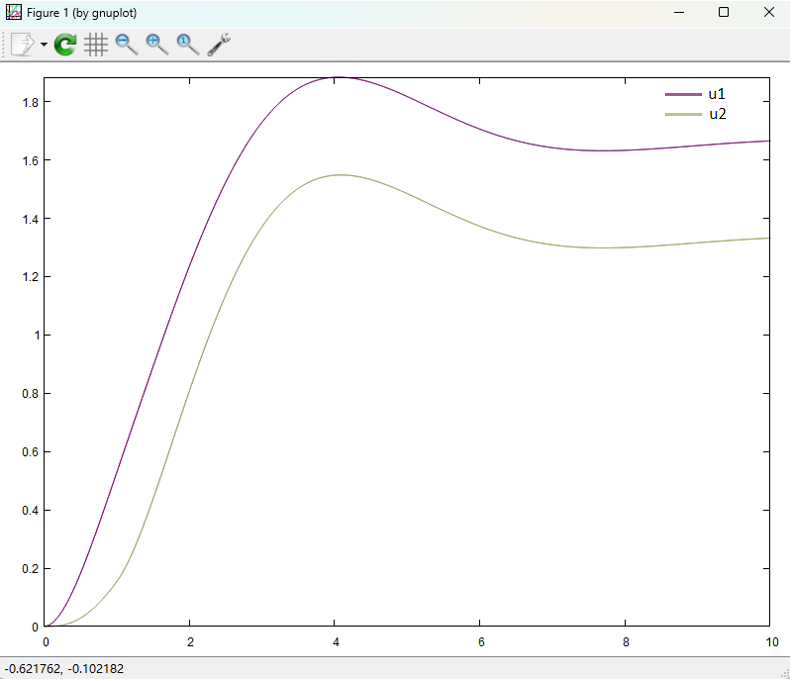
得到的仿真结果,如下图所示:
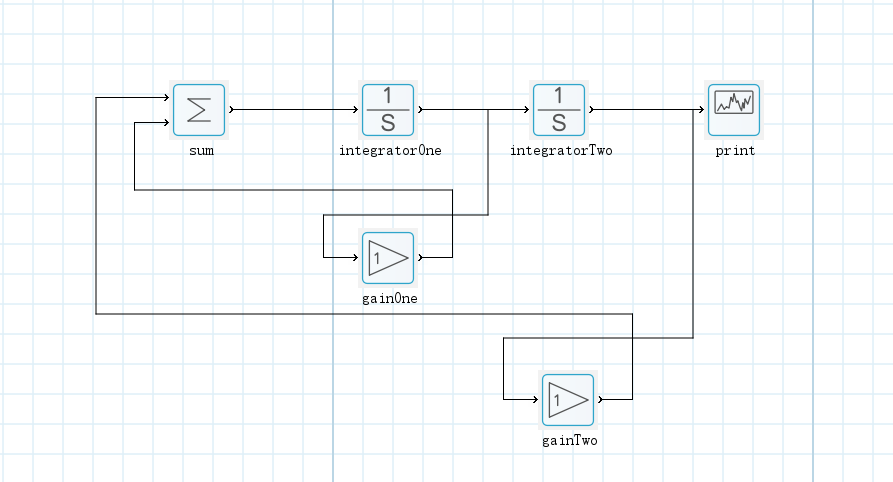
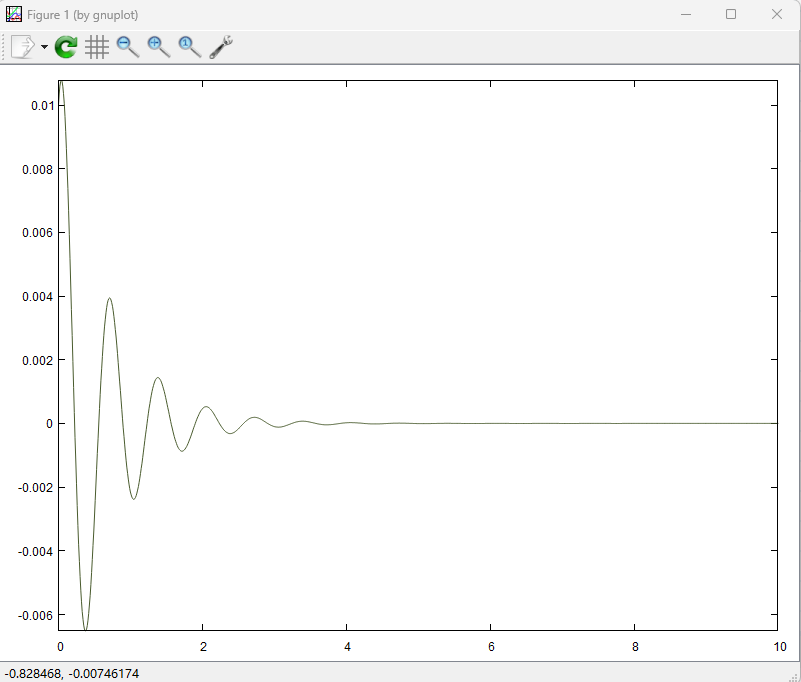
求解二阶微分方程:x’’(t) + 0.4x’(t) + 0.9x(t) = 0.7u(t) 的解,其中u(t)是脉冲信号。
在北太真元建立模型如下图所示:
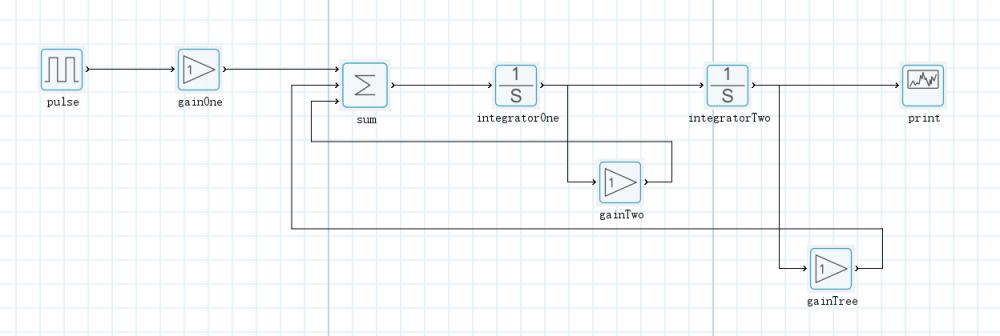
设置仿真参数:
脉冲信号u(t)为方波信号模块,参数振幅 = 1;周期 = 2.5;脉冲宽度 = 50;相位 = 0;
仿真时长:10s;步长0.01s;求解器:ode4
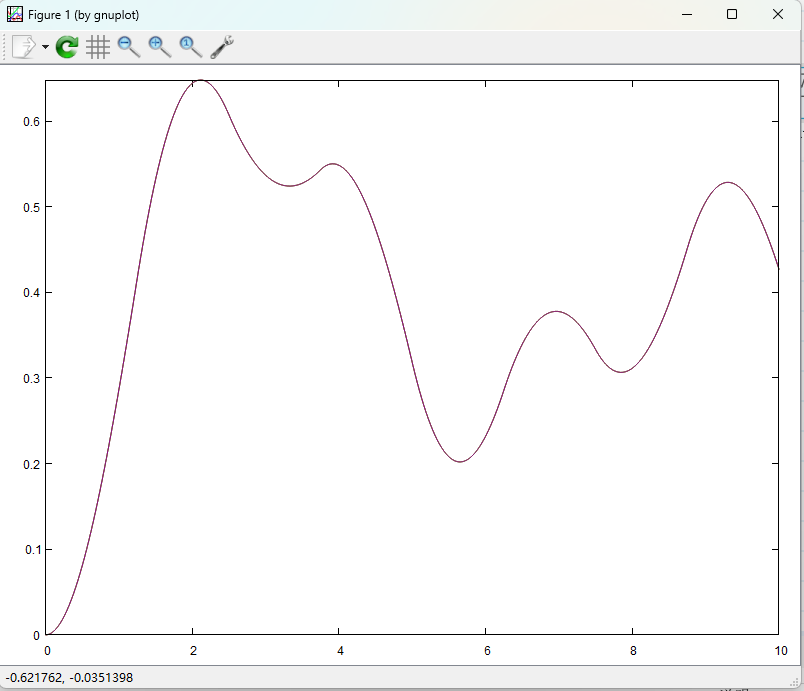
得到的仿真结果,如下图所示:
力——质量系统,要拉动一个箱子(拉力f=1N),箱子质量为M(1kg),箱子与地面的摩擦力为[(b=0.4N.m/s)],其大小与车子的速度成正比。如下图所示:
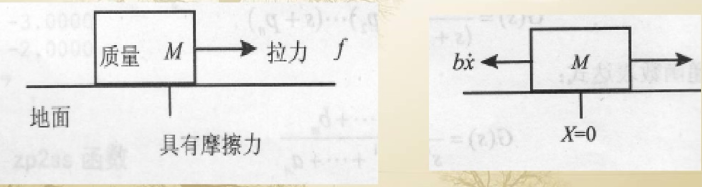
其运动方程式为:
F - bx’ = Mx’’
拉力作用时间为2s。
在北太真元建立模型如下图所示:
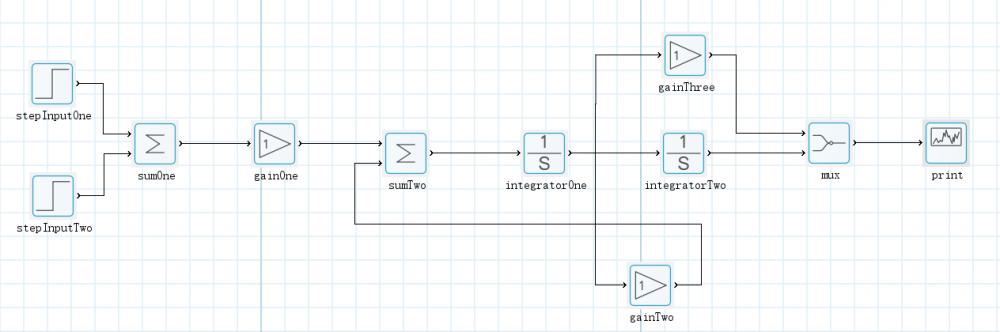
设置仿真参数:
设置stepInputOne模块的阶跃时间为0,表示摩擦力作用时间;
设置stepInputTwo模块的阶跃时间为2,表示拉力作用时间;
设置gainTwo模块的增益值为0.4表示摩擦力;
仿真时长:10s;步长0.01s;求解器:ode4
得到的仿真结果,如下图所示:
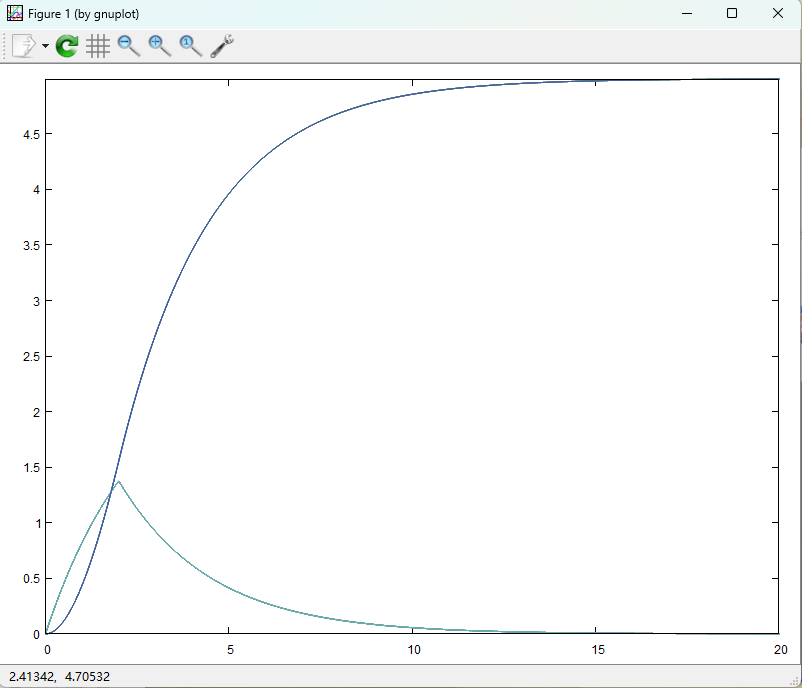
因为有摩擦力存在,箱子最终会停止前进。
零极点增益模型实际上是传递函数的另一种表现形式,其原理是分别对源系统传递函数的分子、分母进行因式分解处理,以获得系统零点和几点的表示形式。
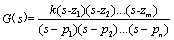
式中,k为系统增益;zi(i = 1,2,3,...,m)为分子多项式的根,称为系统的零点;pj(j = 1,2,...,n)是分母多项式的根,称为系统的极点。
传递函数的分母多项式就是它的特征多项式,它等于零的方程就是传递函数的特征方程,特征方程的根也就是传递函数的极点。传递函数的极点决定了所描述系统的自由运动状态;零点影响系统各模态在系统响应中的比重。
零点增益模型的命令格式如下:
ZPG = zpk(z, p, k)
其中ZPG是建立的零极点增益模型;z、p、k分别是系统的零点向量、极点向量和增益。
例:利用Baltamulink建立系统
G(s) = 18(s + 2) / (s + 0.4)(s + 15)(s + 25)
的零点增益模型,进行系统仿真。
将上面零点增益模型进行转换得到模型的传递函数如下:
G(s) = 18(s + 2)/(s^3 + 40.4s^2 + 391s + 150)
根据该传递函数模型,在北太真元建立模型如下图所示:
设置仿真参数:
仿真时长:20s;步长0.01s;求解器:ode4
得到的仿真结果,如下图所示:
针对标准二阶系统传递函数:
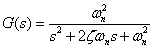
改变ζ(阻尼比)和ωn(自由振荡频率)的参数设置,观察对系统输出的影响。
在二阶系统自由振荡频率ωn不变的情况下,改变阻尼系数ζ为无阻尼(ζ= 0)、欠阻尼(0<ζ< 1)、临界阻尼(ζ= 1)和过阻尼(ζ> 1)的4中状态,分别取ζ= 0,ζ= 0.5,ζ= 1,ζ= 2带入二阶系统传递函数 中,搭建4个不同的仿真模型,输出结果,观察仿真结果得出结论。
根据该传递函数模型,在北太真元建立模型如下图所示:
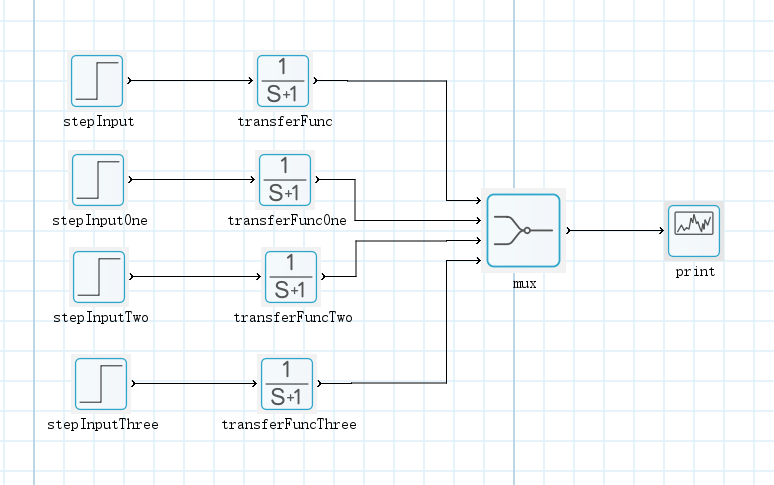
设置仿真参数:
从上到下,传递函数参数依次为:
num = [4];den = [1 0 4];
num = [4];den = [1 2 4];
num = [4];den = [1 4 4];
num = [4];den = [1 8 4];
阶跃信号模块的阶跃时间为0;
仿真时长:6s;步长0.01s;求解器:ode4
得到的仿真结果,如下图所示:
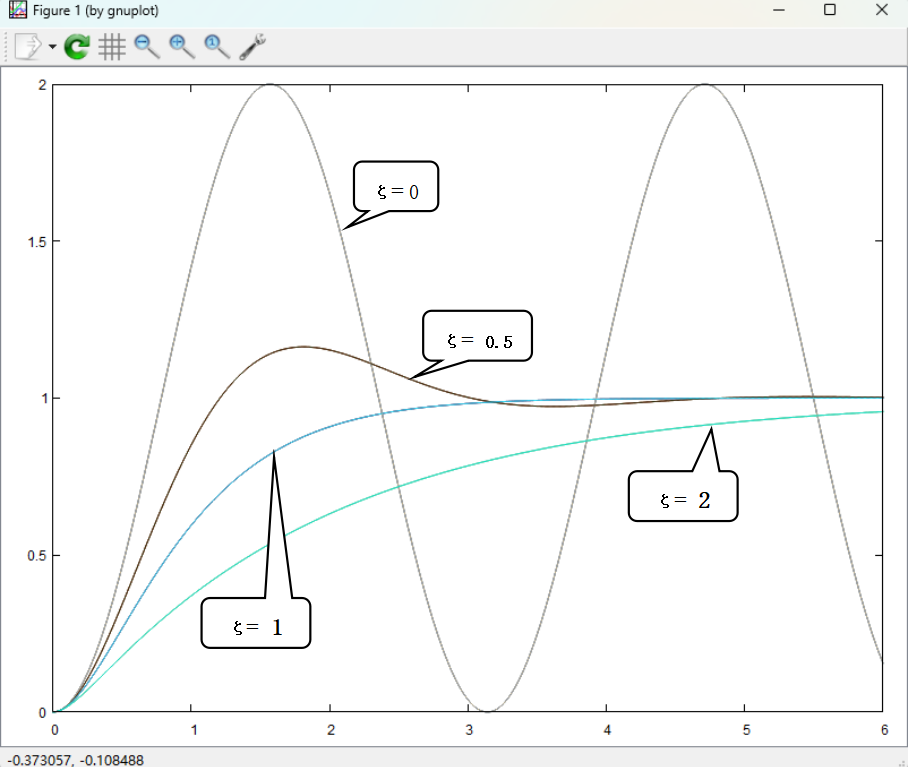
结论:从仿真结果可以看出,改变阻尼比,系统的超调量也在变化,系统达到稳态的时间也发生变化。当ζ= 0无阻尼时,出现等幅振荡曲线,超调量为100%,稳态时间为无穷大;当ζ< 1时,信号曲线衰减振荡,有超调量;当ζ≥ 1时,没有超调量,随着ζ增大,达到稳态的时间也增大。
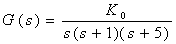
已知开环系统传递函数:
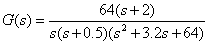
首先将G(s)化为唯一标准形式:
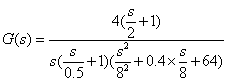
此系统由比例环节、积分环节、惯性环节、一阶微分环节和振荡环节共5个环节组成。
惯性环节转折频率:
一阶复合微分环节转折频率:
振荡环节转折频率:
开环增益:K=4,积分环节数v=1,低频起始段由K/s=4/s决定。
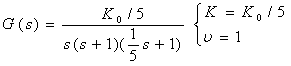
根据该传递函数模型,在北太真元建立模型如下图所示:
设置仿真参数:
从上到下,传递函数参数依次为:
num = [1];den = [1 0];
num = [1];den = [1 0.5];
num = [64 128];den = [1 3.2 64];
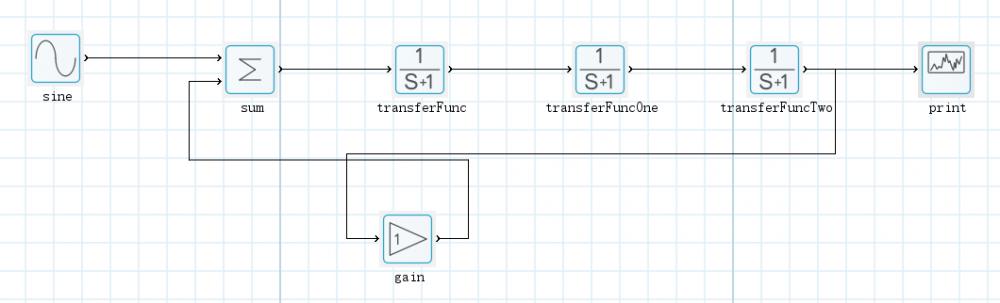
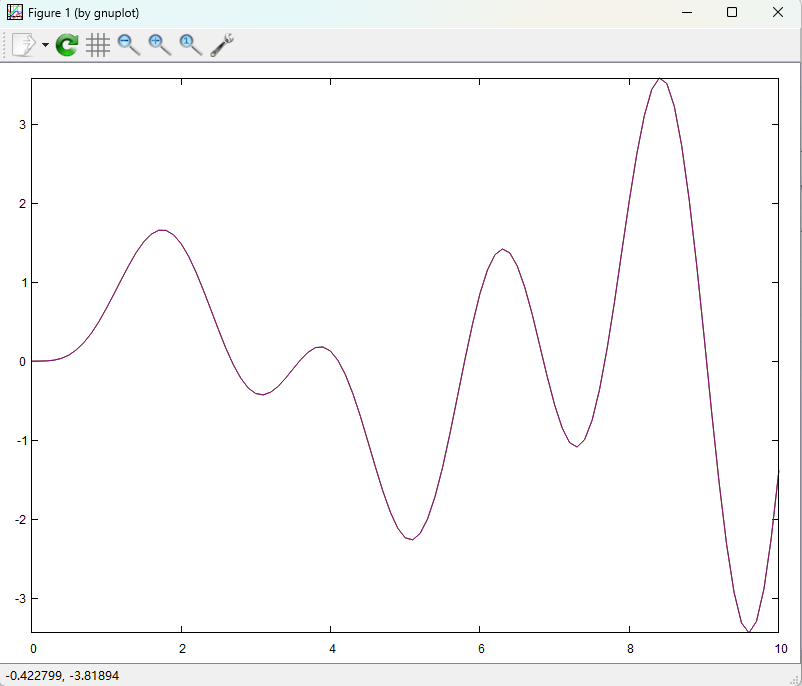
仿真时长:10s;步长0.01s;求解器:ode4
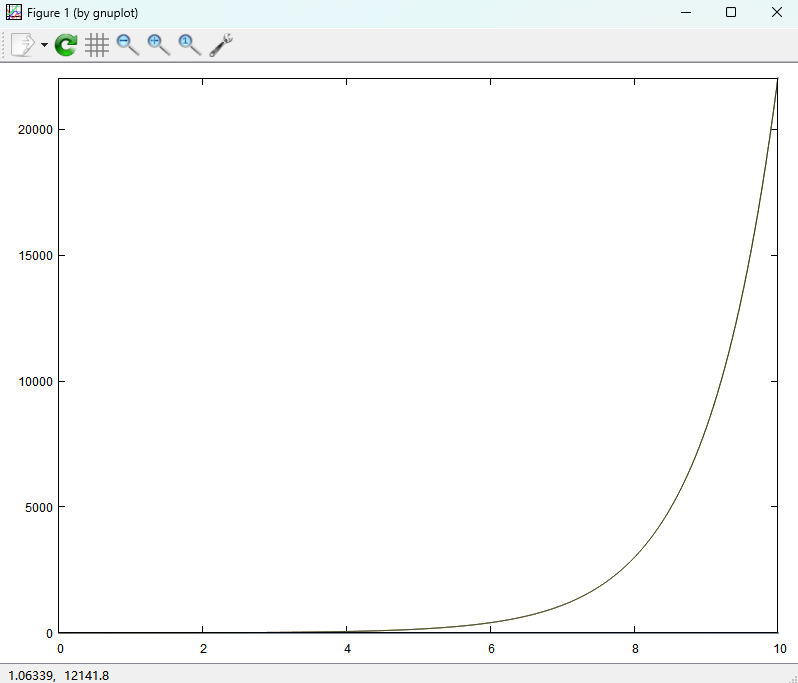
得到的仿真结果,如下图所示:
已知某系统的开环对数频率特性如下图所示,试确定其开环传递函数。
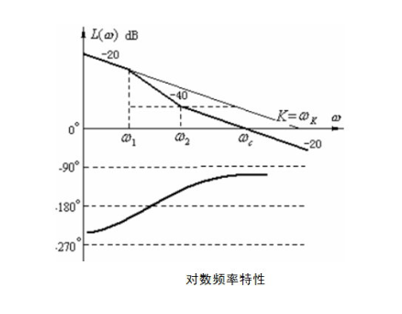
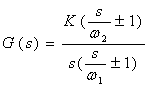
根据对数幅频特性曲线,可以写出开环传递函数的表达形式如下:
根据对数频率特性的坐标特点有 ,可以确定开环增益
,可以确定开环增益 。
。
根据相频特性的变化趋势(-270°-> -90°),可以判定系统为非最小相角系统。
G(s)中一阶复合微分环节和惯性环节至少有一个是“非最小相角”的,将系统可能的开环零点极点分布画出来,如下表所示:
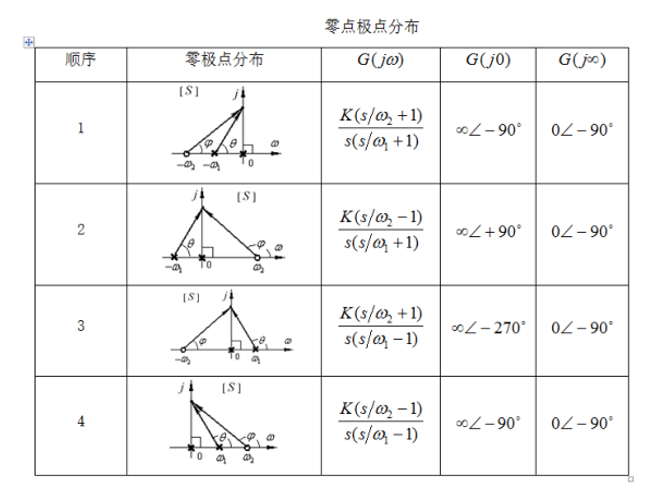
分析相角的变化趋势,可见,只有当惯性环节极点在右半s平面,一阶复合微分环节零点在左半s平面是,相角才符合从-270°到-90°的变化规律。因此可以确定系统的开环传递函数为:
对于最小相角系统,对数幅频特性与对数相频特性之间存在唯一确定的对应关系,根据对数幅频特性就完全可以确定相应的对数相频特性和传递函数,反之亦然。由于对数幅频特性容易绘制,所以在分析最小相角系统时,通常只画其对数幅频特性,对数相频特性则只需概略画出,或者不画。
根据该传递函数模型,在北太真元搭建最小相角系统模型如下图所示:
设置仿真参数:
从上到下,传递函数参数依次为:
num = [1];den = [1 0];
num = [1 1];den = [1 -1];
仿真时长:10s;步长0.01s;求解器:ode4
得到的仿真结果,如下图所示:
控制系统稳定与否是绝对稳定性的概念。而对一个稳定的系统而言,还有一个稳定的程度,即相对稳定性的概念。相对稳定性与系统的动态性能指标有着密切的关系。在设计一个控制系统时,不仅要求它必须是绝对稳定的,而且还应保证系统具有一定的稳定程度。只有这样,才能不致因系统参数变化而导致系统性能变差甚至不稳定。
对于一个最小相角系统而言, 曲线越靠近
曲线越靠近 点,系统阶跃响应的振荡就越强烈,系统的相对稳定性就越差。因此,可用
点,系统阶跃响应的振荡就越强烈,系统的相对稳定性就越差。因此,可用 曲线对
曲线对 点的接近程度来表示系统的相对稳定性。通常,这种接近程度是以相角裕度和幅值裕度来表示的。
点的接近程度来表示系统的相对稳定性。通常,这种接近程度是以相角裕度和幅值裕度来表示的。
要计算相角裕度 ,首先要知道截止频率
,首先要知道截止频率 。求
。求 较方便的方法是先由
较方便的方法是先由 绘制
绘制 曲线,由
曲线,由 与
与 线的交点确定
线的交点确定 。而求幅值裕度
。而求幅值裕度 首先要知道相角交界频率
首先要知道相角交界频率 ,对于阶数不太高的系统,直接解三角方程
,对于阶数不太高的系统,直接解三角方程 是求
是求 较方便的方法。通常是将
较方便的方法。通常是将 写成虚部和实部, 令虚部为零而解得
写成虚部和实部, 令虚部为零而解得 。
。
【例6-10】 某单位反馈系统的开环传递函数为:
试求时系统的相角裕度和幅值裕度。将该开环传递函数变换为:
在实际工程设计中,只要绘出曲线即可。
根据该传递函数模型,在北太真元搭建稳定裕度系统模型如下图所示:
设置仿真参数:
从上到下,传递函数参数依次为:
num = [52];den = [1 0];
num = [1];den = [1 1];
num = [1];den = [1 5];
仿真时长:10s;步长0.1s;求解器:ode4
得到的仿真结果,如下图所示:

 公众号
公众号