已知二自由度质量-弹簧-阻尼串联系统模型如下图所示:
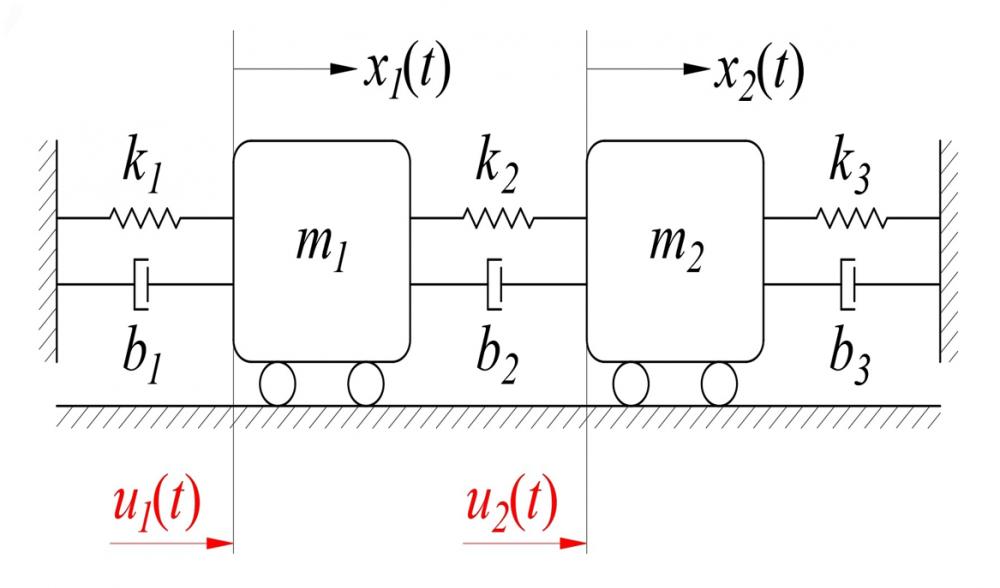
这个系统由两个质量块(小车)和三组弹簧阻尼器组成,假设地面是光滑的,这样系统中没有摩擦作用。 u1(t) 和 u2(t) 分别是两个质量块所受的外力, x1(t) 和 x2(t) 分别是两个质量块的位移。 m1,2、k1,2,3 和 b1,2,3 分别对应图中的质量、弹簧刚度和阻尼系数。是对于整个系统而言,输入两个外力,输出两个位移,因此这是一个多输入多输出系统。两个小车都只能沿横向左右运动,因此为二自由度系统。
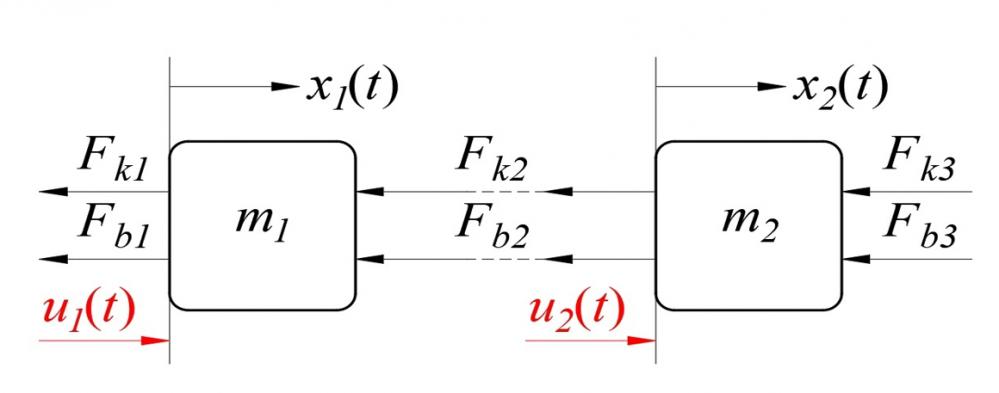
根据牛顿第二定律,物体所受合力等于物体的惯性力,而惯性力是物体质量与加速度的乘积。可以理解为物体受力后产生加速度,而有加速度存在就会产生运动趋势,造成物体运动。
对两个质量块分别进行受力分析:
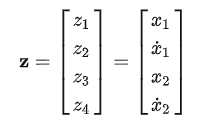
首先需定义系统的状态变量,在这种情况下一般用物体的位移和速度作为状态变量。设状态向量 Z分别对应质量块1的位移和速度、质量块2的质量和速度:
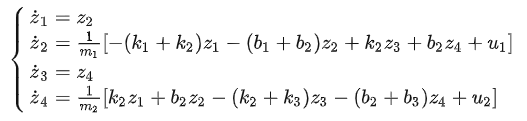
根据上面对模型的数学推导,当将各状态向量 z 对时间求导(微分),可以将系统整理为各状态量的一阶微分方程组:
因为这是一个线性系统,因此系统的状态可以表示为矩阵形式:

式中,A 为系统状态矩阵;B 为输入矩阵;u 为输入(控制)向量:
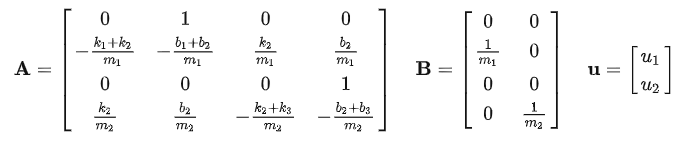
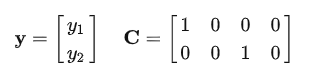
有了系统的状态空间方程,接下来考虑系统的输出,也就是我们希望得到的量。我们假设对两个质量块的位移感兴趣,即 z1 和 z3 ,那么就将它两个状态作为系统的输出,则输出方程的矩阵形式为:y = Cz;
式中,y 为输出向量;C 为输出矩阵:
以上,使用状态空间模型对系统完成描述。
令,质量:m = 1kg;弹簧刚度: k = 1N/m;阻尼系数:b = 1N.s/m。
则,状态空间方程系数如下:
A = [0 1 0 0;-2 -2 1 1;0 0 0 1;1 1 -2 -2];
B = [0 0;1 0;0 0;0 1];
C = [1 0 0 0;0 0 1 0];
D = [0 0;0 0];
在北太真元建立模型如下图所示:
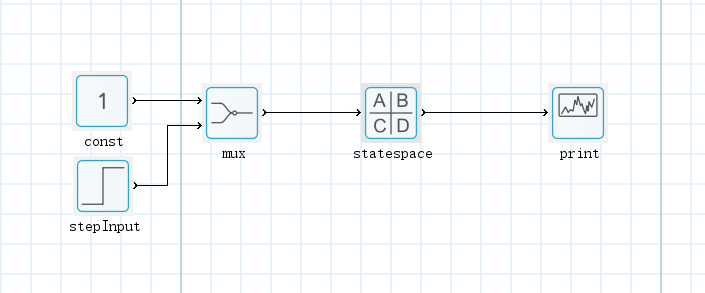
设置仿真参数:
两个质量块所受的外力u1是常量模块 = 2 N; u2是阶跃型号=1N。
仿真时长:10s;步长0.01s;求解器:ode4
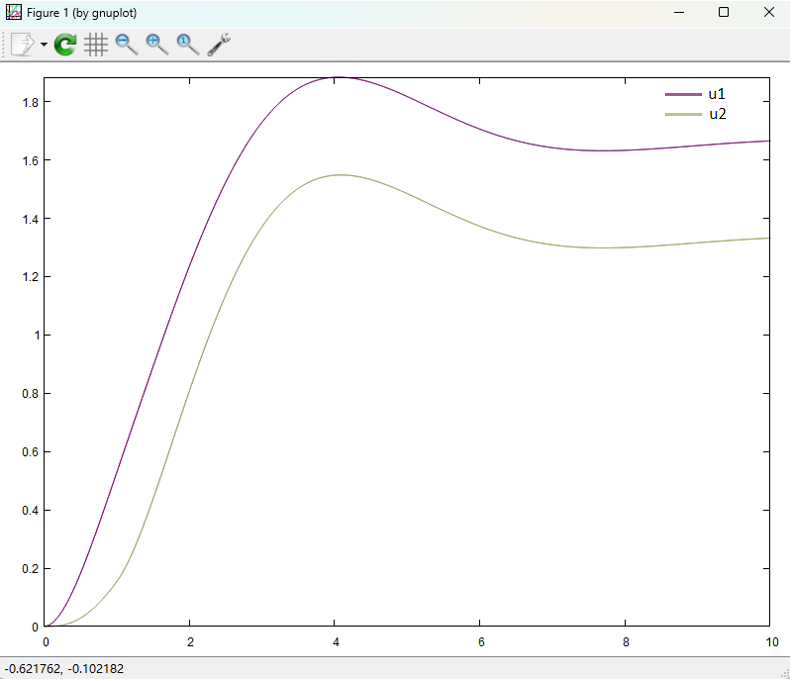
得到的仿真结果,如下图所示:

 公众号
公众号