1) 忽略转向系的影响,以前、后轮转角作为输入;
2) 汽车只进行平行于地面的平面运动,而忽略悬架的作用;
3) 汽车前进(纵轴)速度不变,只有沿y轴的侧向速度和绕z轴的横摆运动(ay<0.4g) ;
4) 驱动力不大,对侧偏特性无影响;
5) 忽略空气阻力;
6) 忽略左右轮胎因载荷变化引起轮胎特性的变化;
7) 忽略回正力矩的变化。
根据模型假设建立如图1所示的二自由度汽车模型。
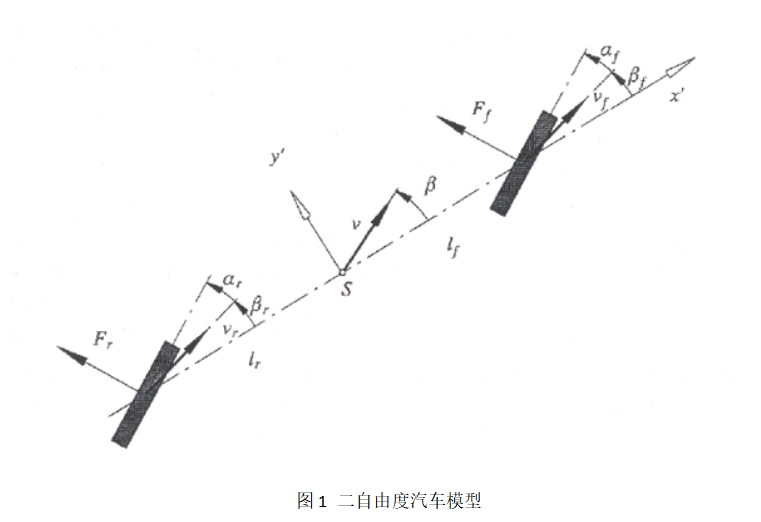
对模型受力分析,存在3个方向的受力平衡,分别为x、y和绕Z的力矩平衡,建立力学方程如下。

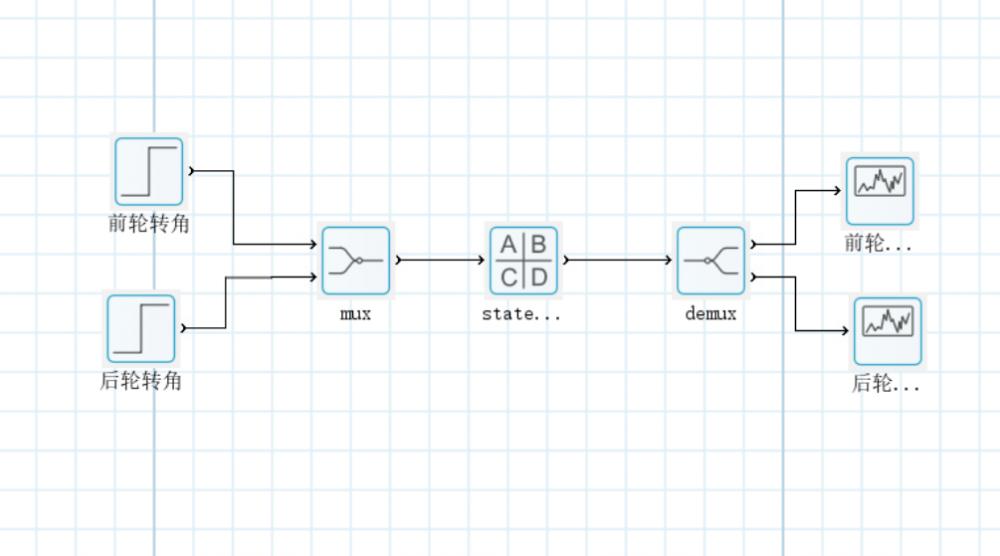
在baltamulink中搭建状态空间模型,模型如图所示。
(1)在前轮偏转角为1,后轮偏转角为1,车速为40km/h的情况下,输出前后轮的横向位移情况,输出结果如图3。
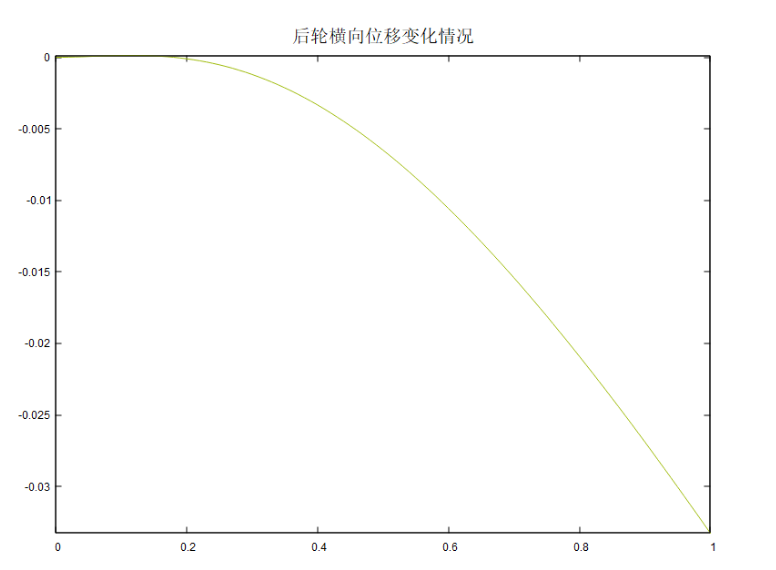
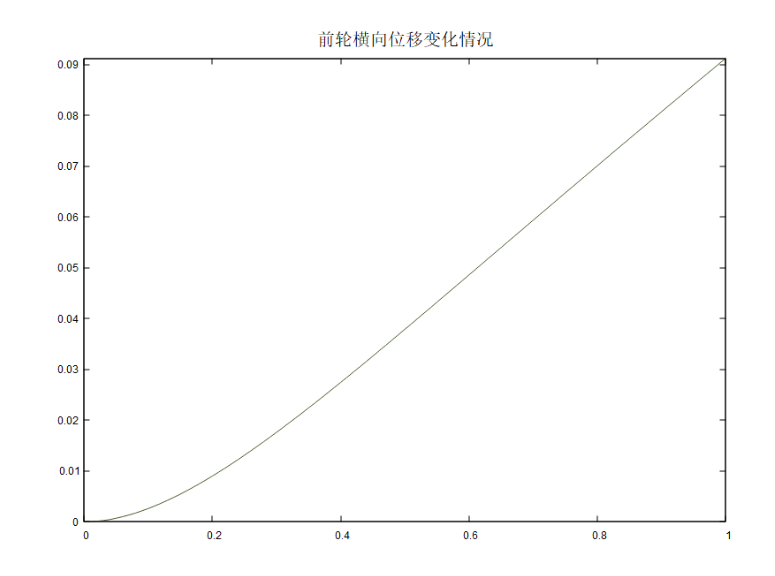
图3
通过建立汽车动力学模型,对汽车操纵性进行饿模拟。根据仿真结果可以发现车速和前轮转角都对二自由度汽车的操纵稳定性有很大影响。汽车以较低速度、较小的前轮转角行驶时,是相对安全的。
通过分析图3可以看出前、后轮的横向位移都是发散的,这是因为给前轮的一个阶跃响应,一直存在前轮转角,同时系统没有加入闭环控制,属于开环控制,这就导致前后轮的横向位移处于发散状态。
baltamatica代码如下
clc;clear;close all;
%% 基本车辆参数
v=40/3.6;%输入为km/h,方程单位为m/s
m=16000;%车重
I=10.85*m;%转动惯量
cf=340000;%侧偏刚度
cr=cf;
lf=2.65;%前轴到重心的距离
lr=3.35;%后轴到重心的距离
a=pi/180;
%% 组装矩阵
A=[-(cf+cr)/(m*v) -1-(cf*lf-cr*lr)/(m*v^2) 0 0
-(cf*lf-cr*lr)/I -(cf*lf^2+cr*lr^2)/(I*v) 0 0
v lf 0 0
v -lr 0 0];
B=[cf/(m*v) cr/(m*v)
cf*lf/I cr*lr/I
0 0
0 0];
C=[0 0 1 0
0 0 0 1];
D=zeros(2,2);

 公众号
公众号