相比于最原始的 RRT 算法的一些缺点,提出的一种改进的 RRT 算法
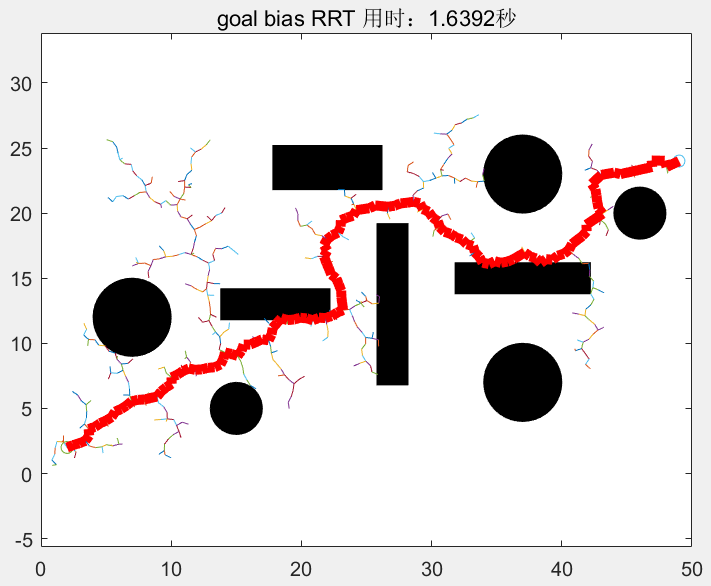
为了加快随机树到达目标点的速度,简单的改进方法是:在随机树每次的生长过程中,根据随机概率(0.0 到 1.0 的随机值 p)来选择生长方向是目标点还是随机点。2001 年,LaValle在采样策略方面引入 RRT GoalBias 与 RRT GoalZoom,RRT GoalBias 方法中,规划器随机采样的同时,以一定概率向最终目标运动;RRTGoalZoom 方法中,规划器分别在整个空间和目标点周围的空间进行采样。
和普通RRT的区别仅在于随机撒点的时候有区别,这个p越大,算法越快,但对于复杂地形,可能会陷入局部极小处,反而变慢。一般取p=0.1
Rapidly-Exploring Random Trees: A New Tool for Path Planning

 公众号
公众号