路径规划(也叫运动学规划),任务是确定控制输入,以驱动机器人从初始配置和速度到目标配置和速度,同时服从基于物理的动力学模型,且能确保机器人在环境中避开障碍。说白了,就是给你一张地图,且已知障碍物分布,以及起始点和目标点的坐标,希望你根据这些信息,找到一条从起点到终点的能绕开障碍物的有效路径,如果可以,还希望这条有效路径尽可能最优(最短),并且希望找到这条有效路径的时间尽可能短(算法足够高效)
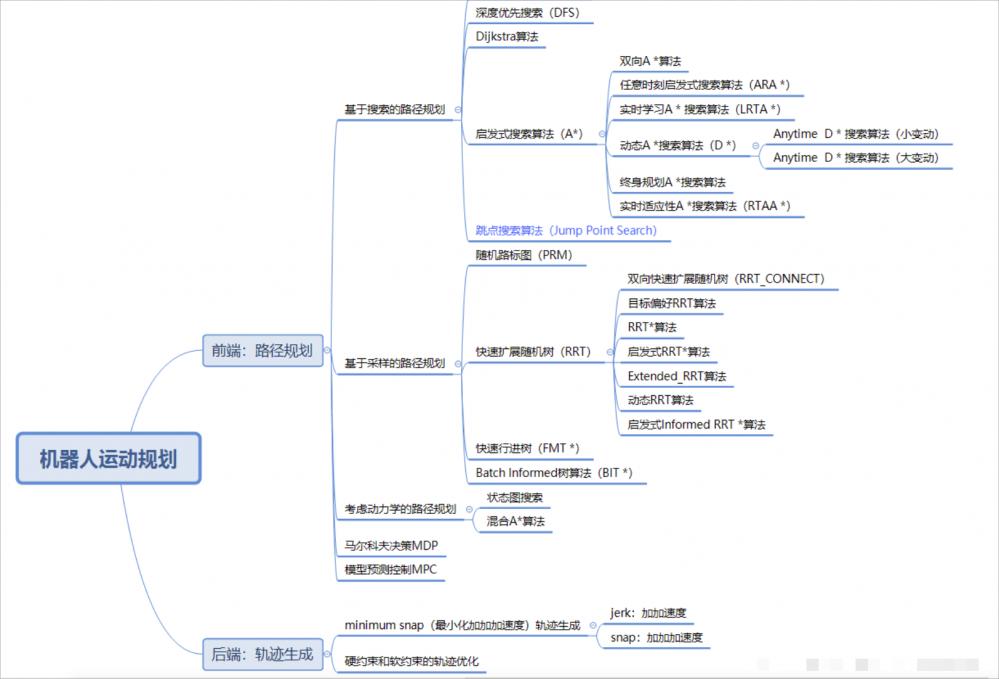
目前流行的路径规划分为两大类:基于采样的路径规划和基于搜索的路径规划。
运动规划的状态空间是应用于机器人变换的集合,称为位姿空间(configuration space),引入了 C-空间、C-空间障碍物、自由空间等一系列概念,下面介绍一些概念:
机器人一个位姿指的是一组相互独立的参数集,它能完全确定机器人上所有的点在工作空间 W 中的位置,这些参数用来完整描述机器人在工作空间 W 中的状态。一个位姿通常表示为带有位置和方向参数的一个向量(vector),用 q 表示。
机器人的自由度定义为机器人运动过程中决定其运动状态的所有独立参数的数目,即 q 的维数。
位姿空间是机器人所有可能位姿组成的集合,代表了机器人所有可能的运动结果,称为 C-空间,也可简记为 C。
C-空间中的距离函数定义为该空间中的一个映射


 公众号
公众号