已知完全可控开环系统状态方程 ,
,
其中:A = [-6 -5 -2;1 0 0;0 1 0],B = [1; 0; 0],C = [0 0 1],D = 0
增益矩阵K = [8 43 78];增益L = 80。
在Baltamulink中构建如下图所示的仿真模型:
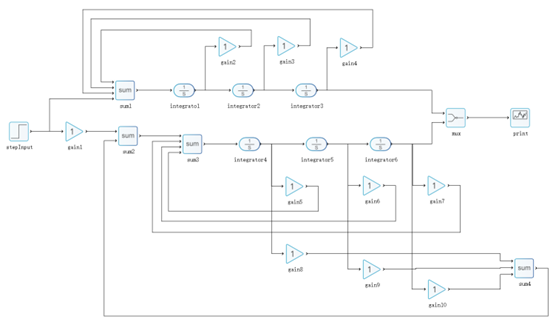
设置仿真参数:
阶跃信号模块:阶跃时间为0;
Sum1模块:符号为 ++++
Sum2模块:符号为 +-
Sum3模块:符号为 ++++
Sum4模块:符号为 +++
Gain1模块 = 80
Gain2模块 = -6
Gain3模块 = -5
Gain4模块 = -2
Gain5模块 = -6
Gain6模块 = -5
Gain7模块 = -2
Gain8模块 = 8
Gain9模块 = 43
Gain10模块 = 78
仿真时长:12;步长0.01s;求解器:ode4
得到的仿真结果,如下图所示:
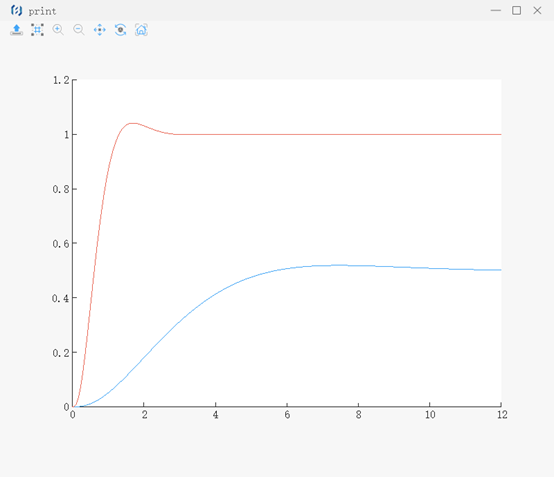
蓝色为原闭环系统的阶跃响应曲线;
红色为状态反馈控制后的阶跃响应曲线。

 公众号
公众号