使用4:1衰减曲线法设计下列被控传递函数的PI控制器,分别计算P控制、PI控制的参数值,并绘制控制前后系统的单位阶跃响应曲线。4:1衰减法控制参数计算公式如下表所示:
4:1衰减法控制

被控传递函数方程如下:
Gp(s) =1 / 100^3 + 80^s + 17s + -1;
调节参数时,比例系数由小变大,并增加扰动观察响应过程,知道响应曲线峰值衰减比为4:1,记录此时的比例系数Kp为Ks,两个峰值之间的时间周期为周期Ts。
假设:响应曲线峰值衰减比为4:1时的比例系数 Ks= 4.74;
两个峰值之间的时间周期 Ts = 21.9967;
则,按照上面4:1衰减法控制表中的计算公式可得:
P控制:比例系数 Kp = Ks = 4.74;
PI控制:比例系数 Kp = Ks/1.2 = 3.95;
积分时间常数 Ti = 0.5 * Ts = 10.9984;
积分系数 Ki = Kp / Ti = 3.95 / 10.9984 = 0.3591;
P(比例)控制
首先,把控制器设置成纯比例控制,即令积分系数Ki和微分系数Kd为零,在北太真元建立模型,形成比例控制系统,结构如下图所示;
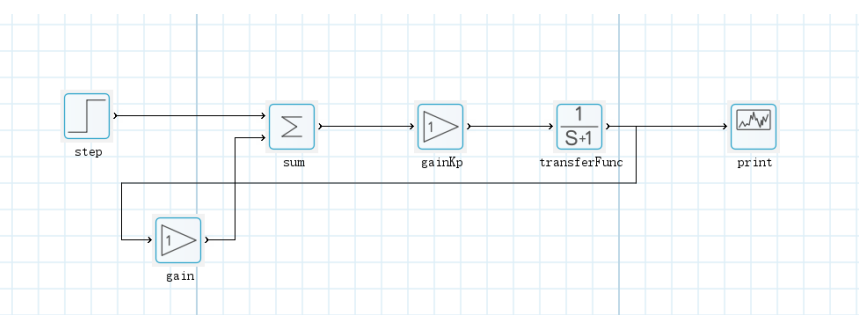
设置参数:
仿真时长:30s;步长0.01s;求解器:ode4
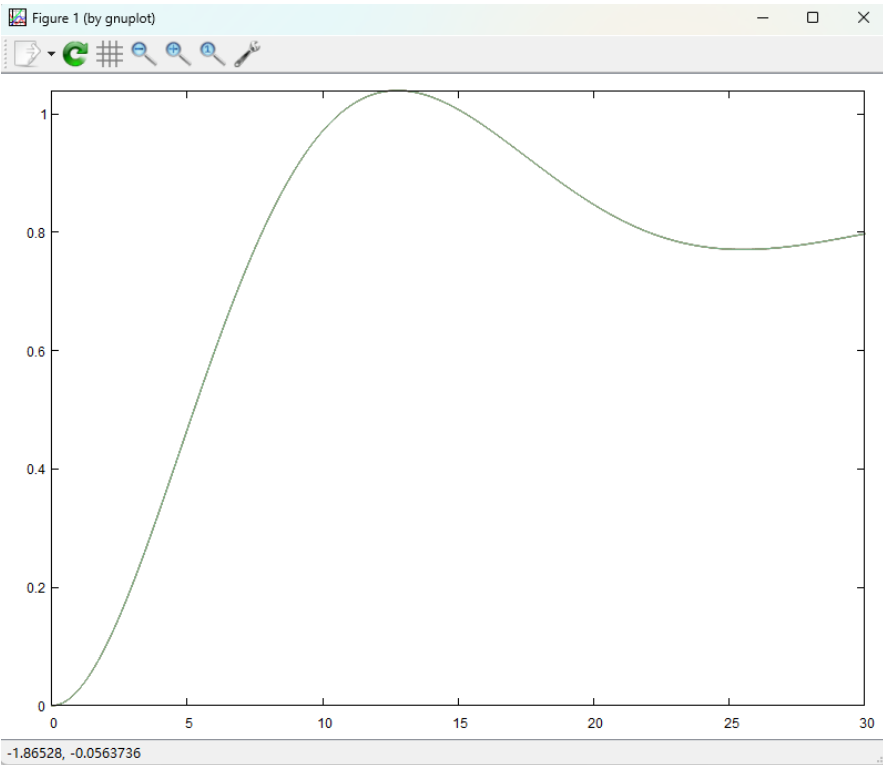
得到的仿真结果,如下图所示:
PI(比例积分)控制
首先,在纯比例控制系统的基础上增加积分系数Ki,令微分系数Kd为零,在北太真元建立模型,形成比例控制系统,结构如下图所示;
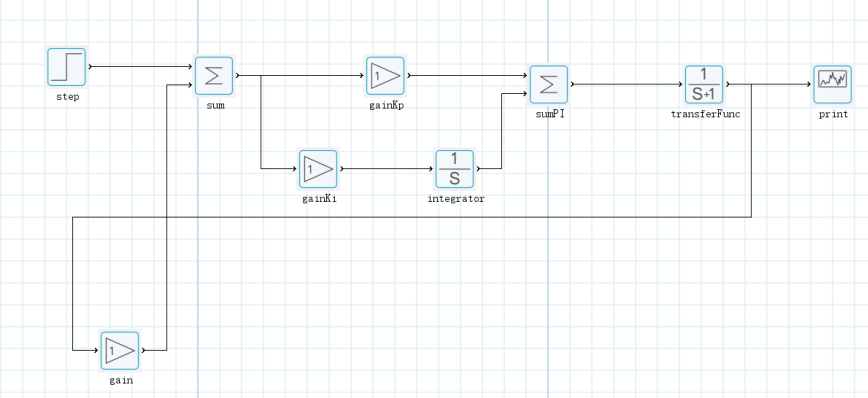
设置参数:
仿真时长:30s;步长0.01s;求解器:ode4
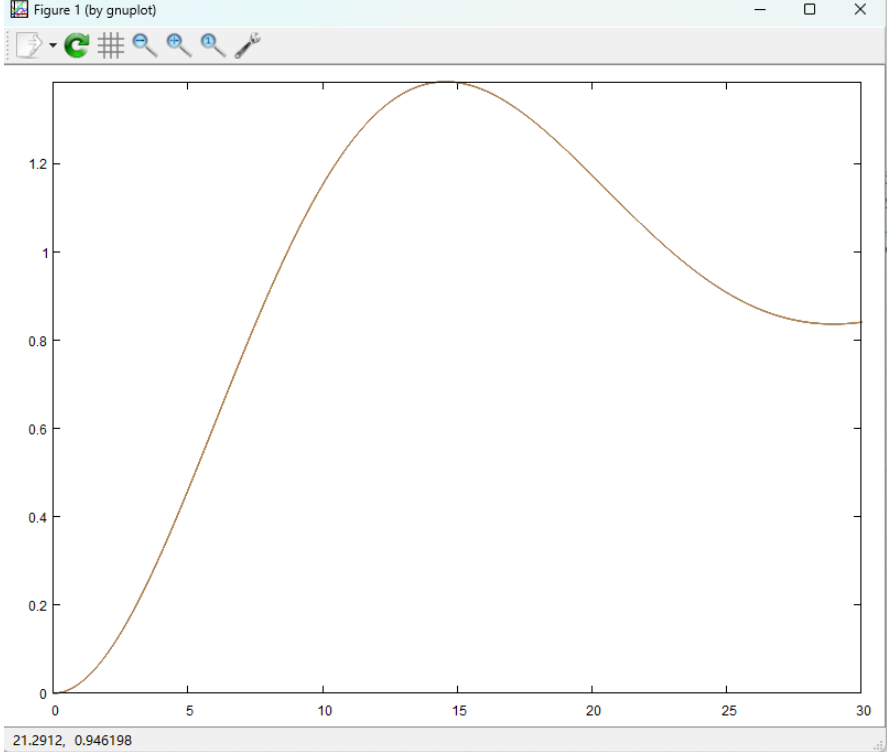
得到的仿真结果,如下图所示:

 公众号
公众号