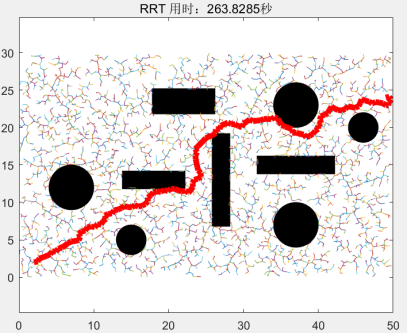
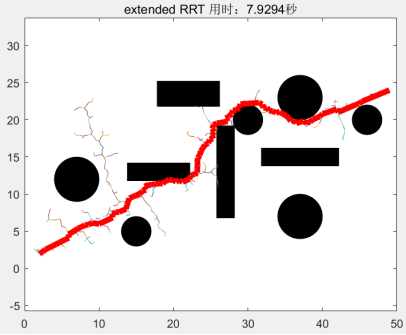
在现实世界的场景中,通常会出现这样的情况:有关环境的初始可用信息是不完整的,或者环境本身是动态的。在这些情况下,当接收到新信息时,初始解决方案可能会失效,例如通过机载传感器。当这种情况发生时,通常会放弃当前的 RRT,并从零开始生长新的 RRT。这可能是一项非常耗时的操作,尤其是在规划问题很复杂的情况下。另一方面,在确定性规划界存在重规划算法,当这种变化发生时,它们能够有效地修复之前的解决方案,而不需要从头重新规划。这就是通过连续域规划路径的问题,如果每次更新地图,都用RRT重新规划,效率相当低下。Extended_RRT则专门用于解决这种动态路径规划问题。
Extended_RRT的思路是这样的:在老地图中,由RRT算法得出的路径,在障碍物动态变化不太大的前提下,在新地图中,大概率也是能通过的,就算障碍物变化很大,之前的路径也或多或少包含了当前障碍物区域的信息,所以,在新障碍物区域中,在重新规划路径时,原有的初始RRT路径的信息可以利用上,而没有必要完完全全重零开始用RRT来规划。
那么如何利用上初始RRT路径的信息呢?
思路如下:
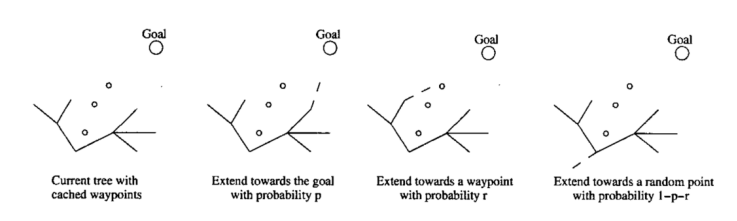
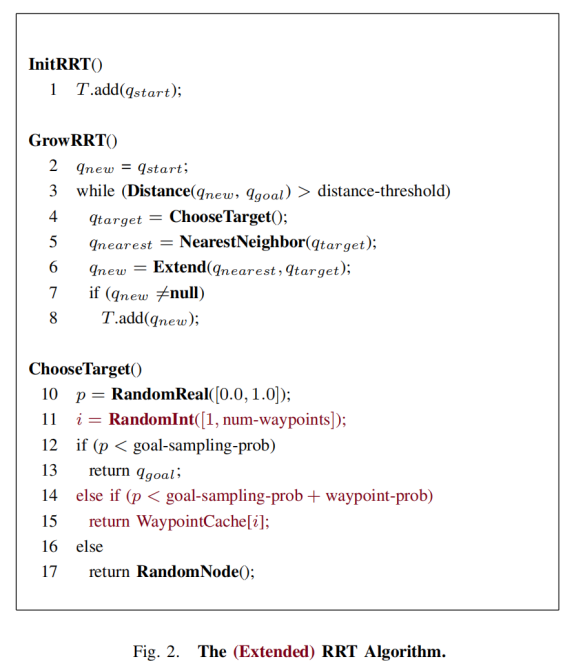
在老地图上先用RRT算法的处一条初始路径,将这条初始路径上的节点存储在集合waypoints中,当环境更新后,希望在新地图上得出一条路径,在随机撒点的步骤,新的随机点有概率p落在目标节点处,此外,还有r的概率落在waypoints的节点中,剩余1-p-r的概率在目标区域内随即撒点。这样在重规划时,就可以把初始路径的信息利用进来。完成随机点选取后,剩余的碰撞检测、树的生长、路径回溯步骤与RRT一致。
总结:
Extended_RRT适用于需要反复路径重规划的场景中,效率比直接重新进行RRT要高得多,和RRT的主要区别在于,在选取新的随机点时,利用上了初始路径的信息,而不是完全随机撒点。
1、Real-Time Randomized Path Planning for Robot Navigation*
2、Extended RRT algorithm with dynamic N-dimensional cuboid domains
3、Replanning with RRTs

 公众号
公众号