基于搜索的路径规划算法基本都是一个套路,它们都是根据启发函数重备用节点的集合中来寻找下一个节点,不同的启发函数也就有不同的搜索类算法。
搜索类算法是离散化的算法,体现在整个图的区域是由有限个小方块区域组成的。我们暂且把这些小方块区域称为“节点”。因此,整个区域被有限个节点填充,且每个节点的邻居节点为有限个。
设置两个集合OPEN,CLOSE,OPEN初始状态设为{x_init},CLOSE 初始状态设为空集。
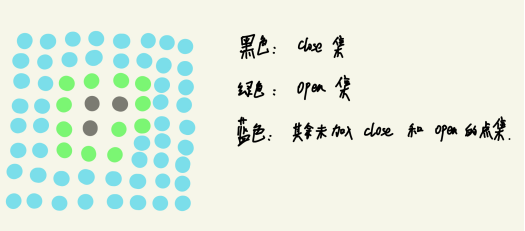
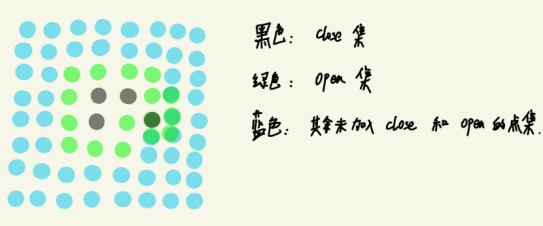
依据不同的启发式函数,从open集中选择一个点加入到close集中,然后拓展open集,如上图,右下角的某个点被某种启发式函数选中,加入到close集中,并相继拓展open集
下面介绍下搜索类算法的前进过程:
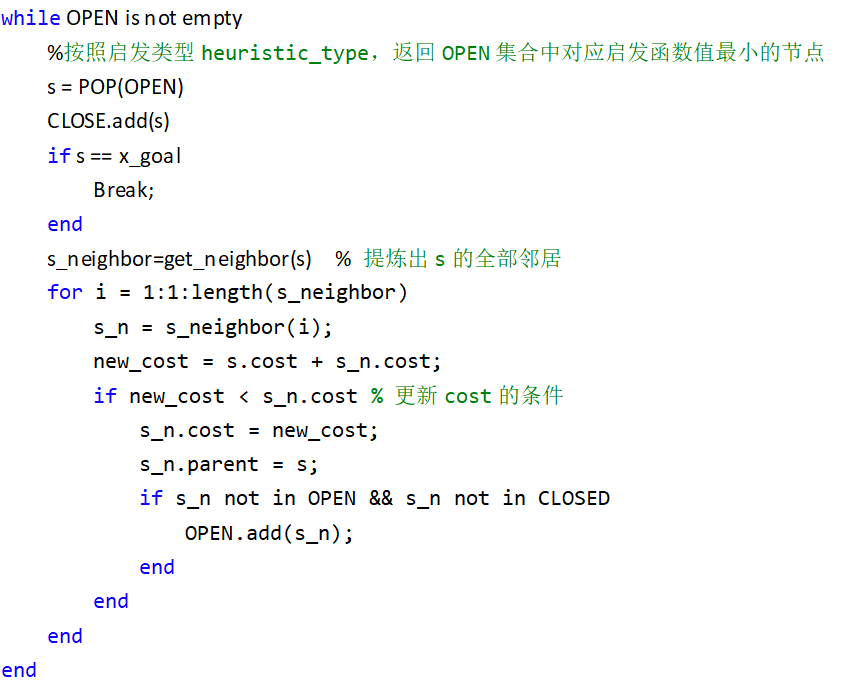
当上述伪码退出循环后,沿着x_goal的父节点往前回溯极为路径
各搜索类算法的区别在于第三行启发函数的类型的不同,导致连接的节点不同。

 公众号
公众号